
Autonomous Driving Algorithm Research
Li, H., Peng, T., Wang, B., Zhang, R., Gao, B., Qiao, N., Guan, Z., Li, J., & Shi, T. (2025). Safedrive Dreamer: Navigating Safety-Critical Scenarios in Autonomous Driving with World Models. Alexandria Engineering Journal.
We proposed a new autonomous driving framework by integrating a model-based RL and PAC-Bayes to mitigate the sim-to-real gap. It enhanced the safety performance on both the learning and transfer stages.
I've assisted in the algorithm design and conducted extensive literature reviews, designed the reward mechanism, sim-to-real transfer, and participated in experiments setup and assisted in completing the experimental process.
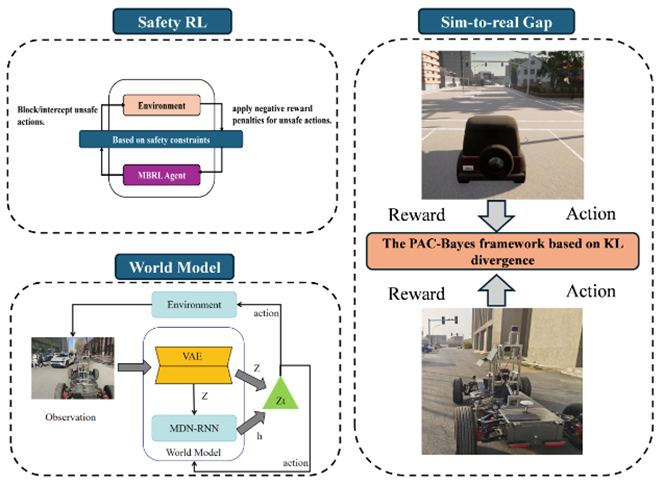
Summary of key elements in the Safedrive Dreamer
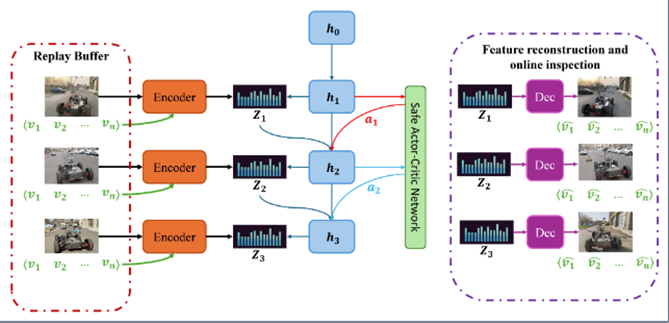
Safedrive Dreamer Algorithm Architecture
Experiment Validation
Not only being validated in the simulator, we also implement the framework onto a real-world platform. By comparing key performance indicators, such as Meters Per Intervention (MPI), Success Rate (SR), Travel Time (TT), and Standard Deviation of Speed (Std[v]), the framework was proven to be effective.
It achieved superior results with a 91.3% success rate and 97.8 meters per intervention in simple scenarios, and 71.8% success rate and 80.7 meters per intervention in complex scenarios, demonstrated safety advantages in both simple and complex scenarios.
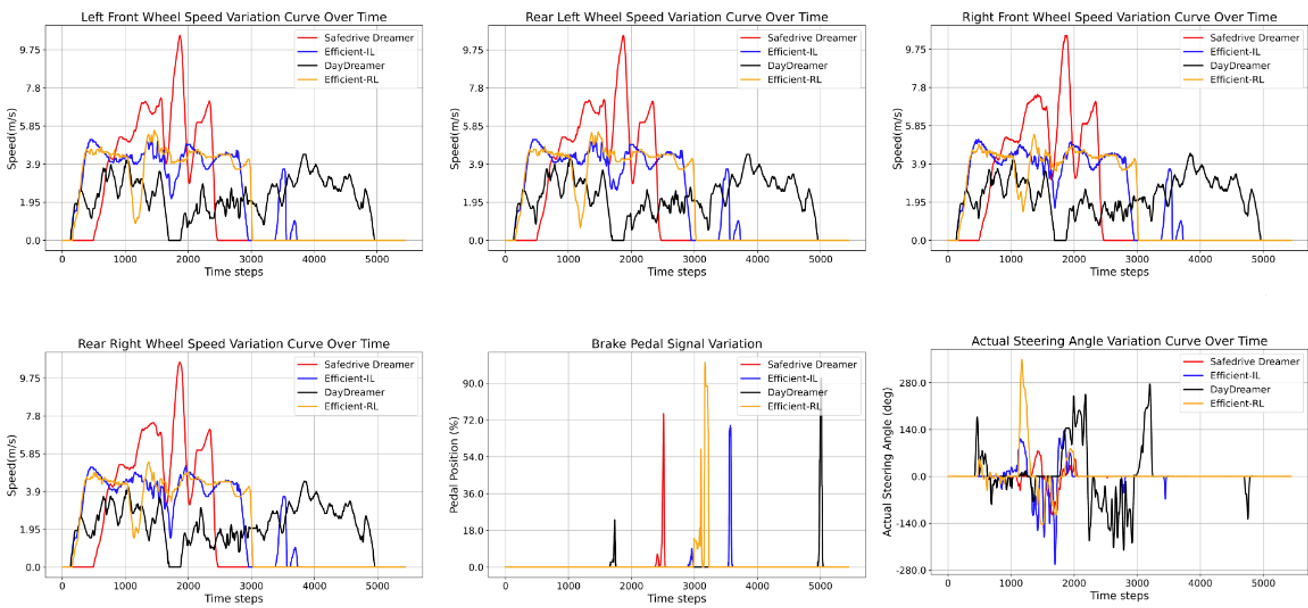
Partial experimental results
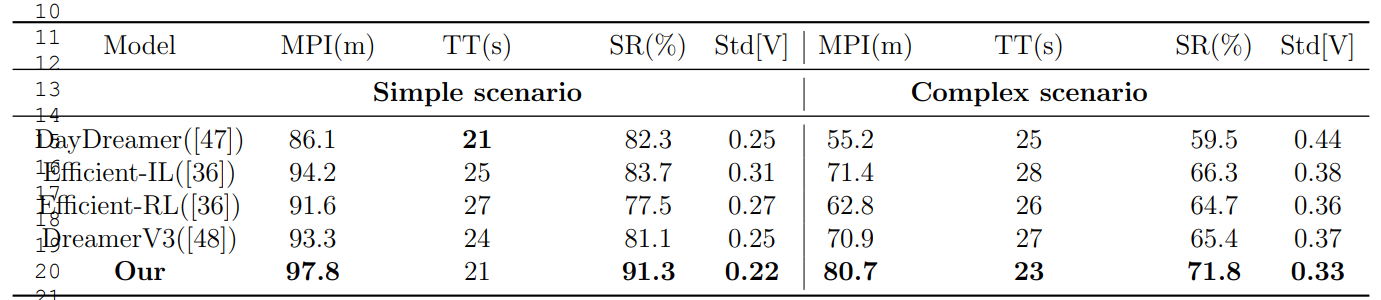
Performance Comparison with Baseline Model