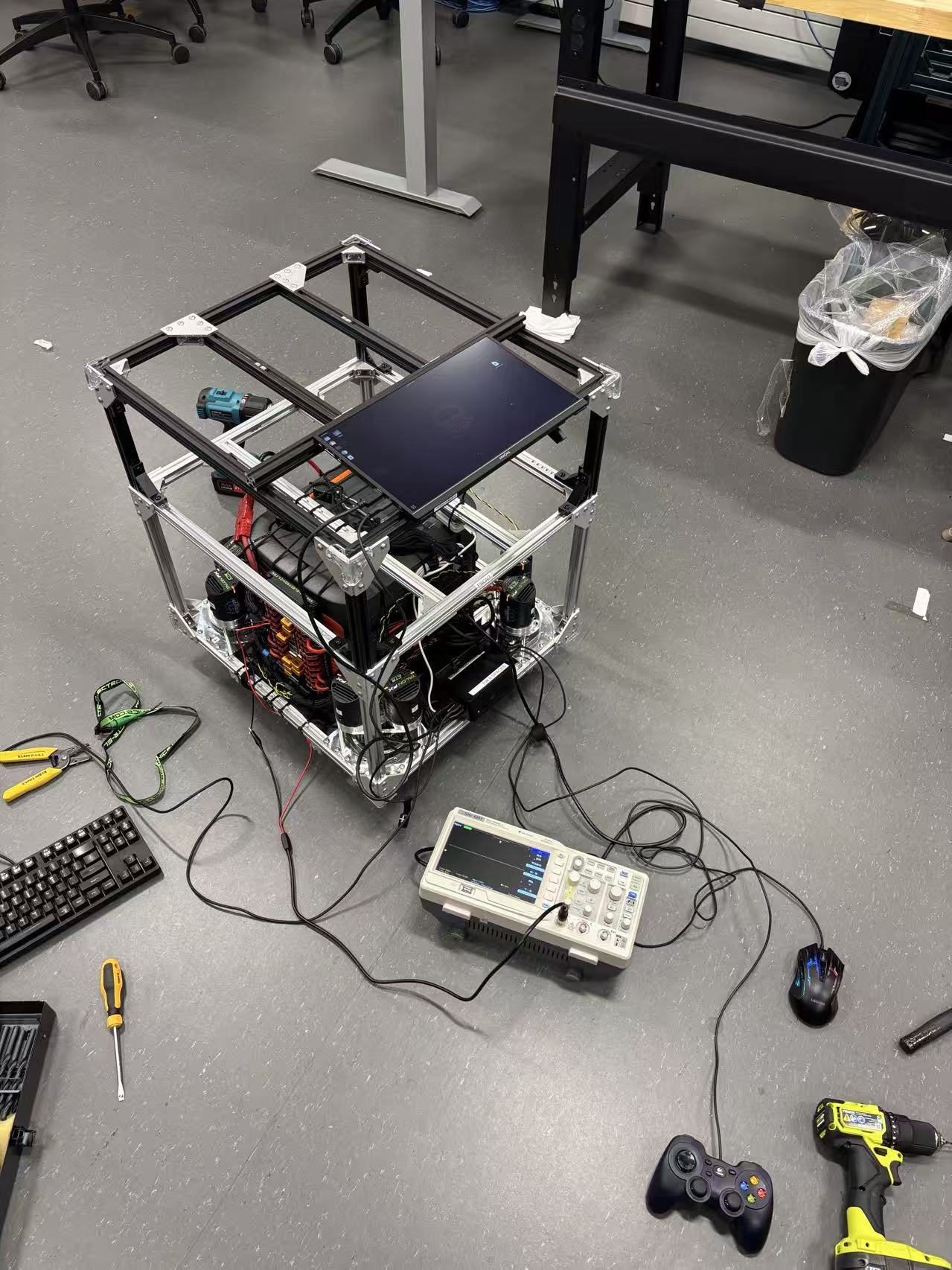
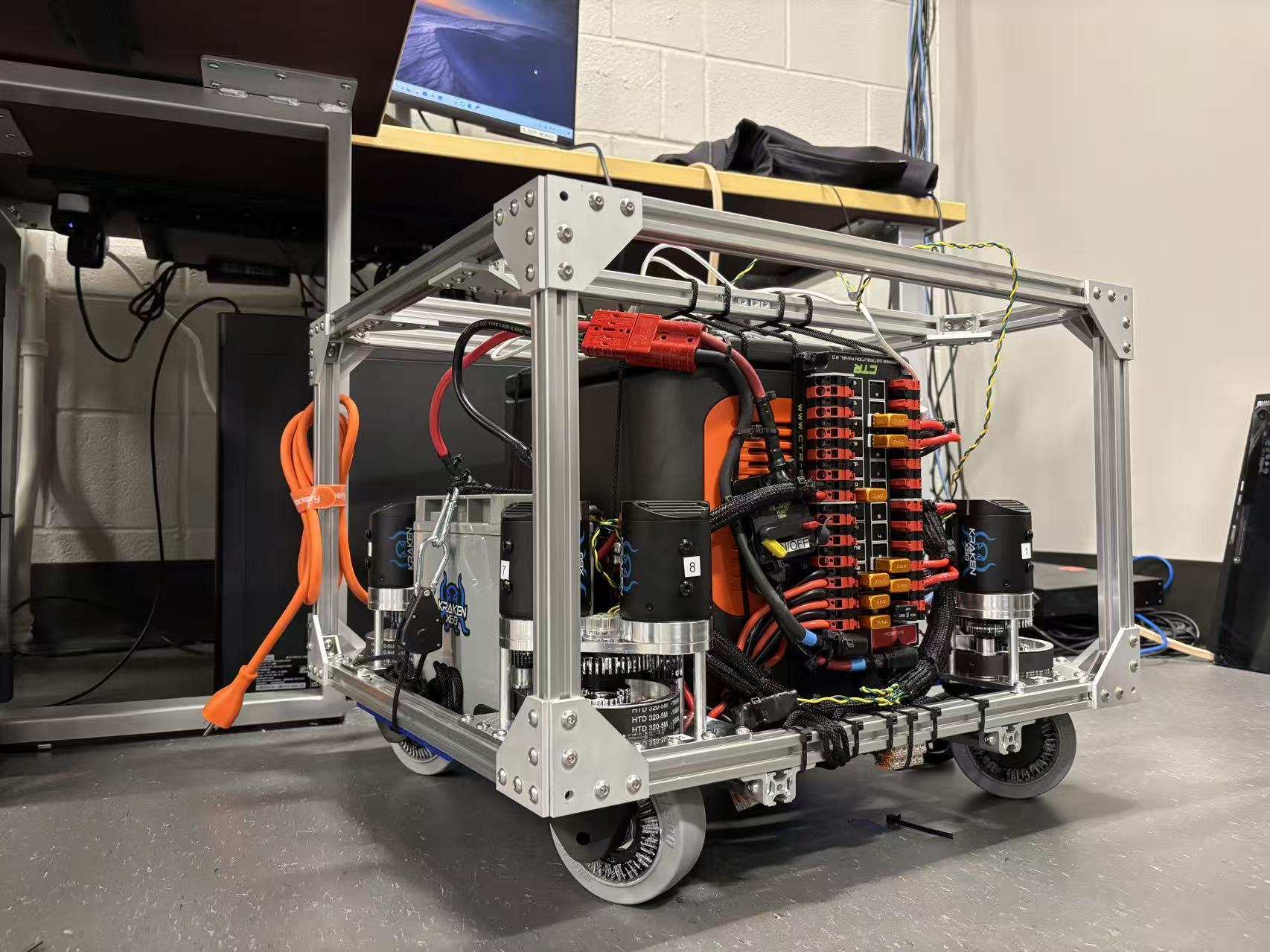
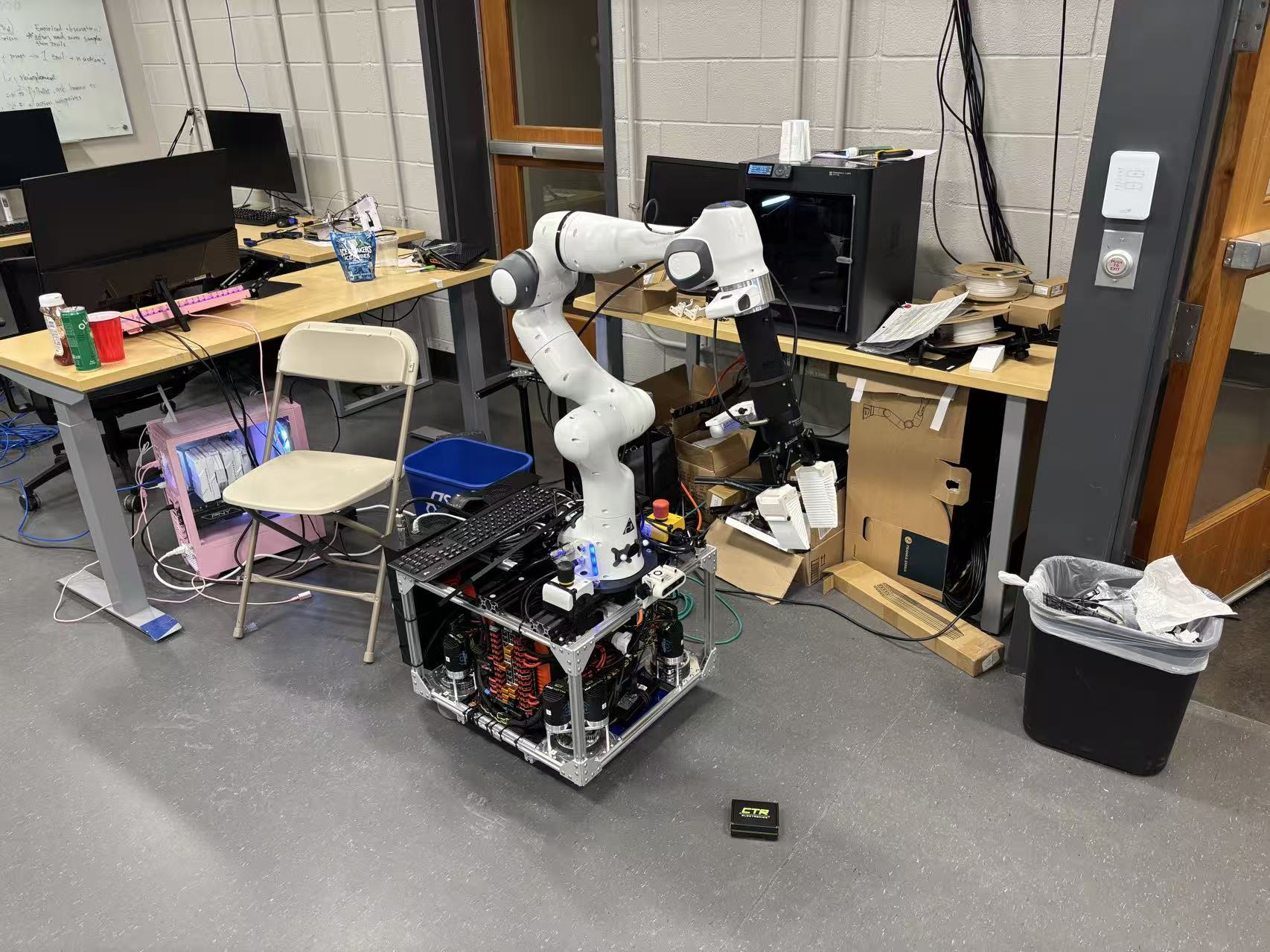
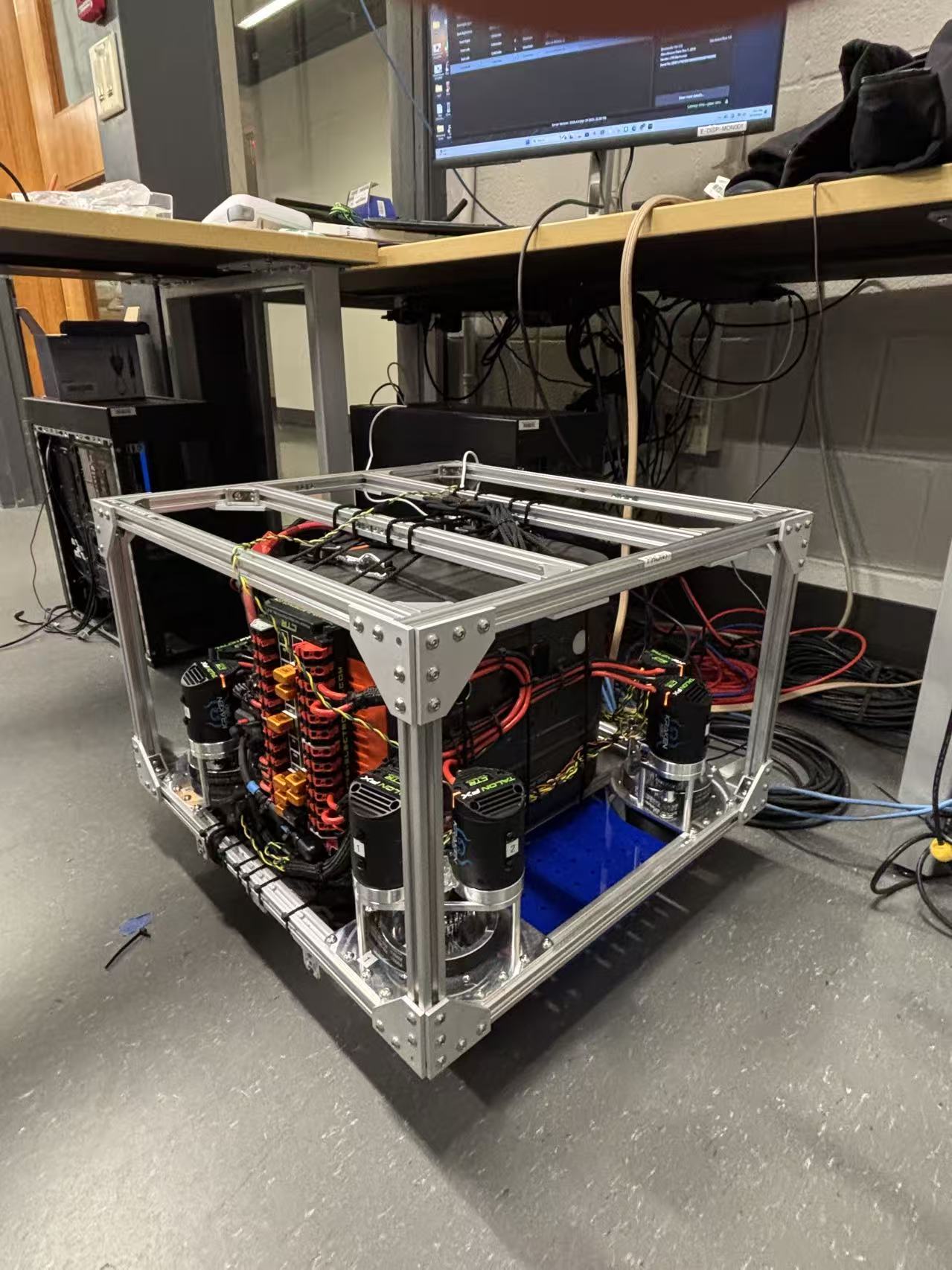
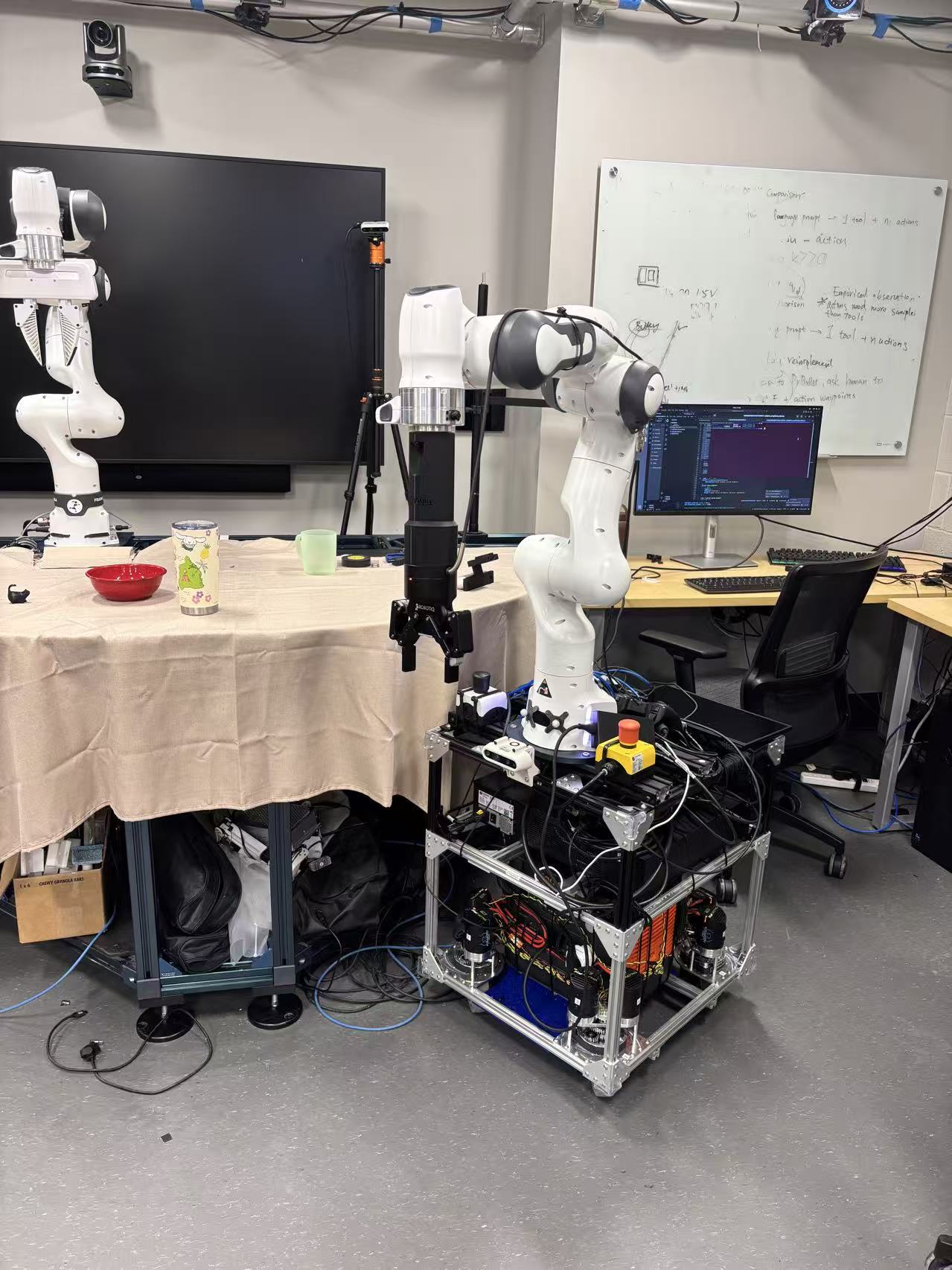
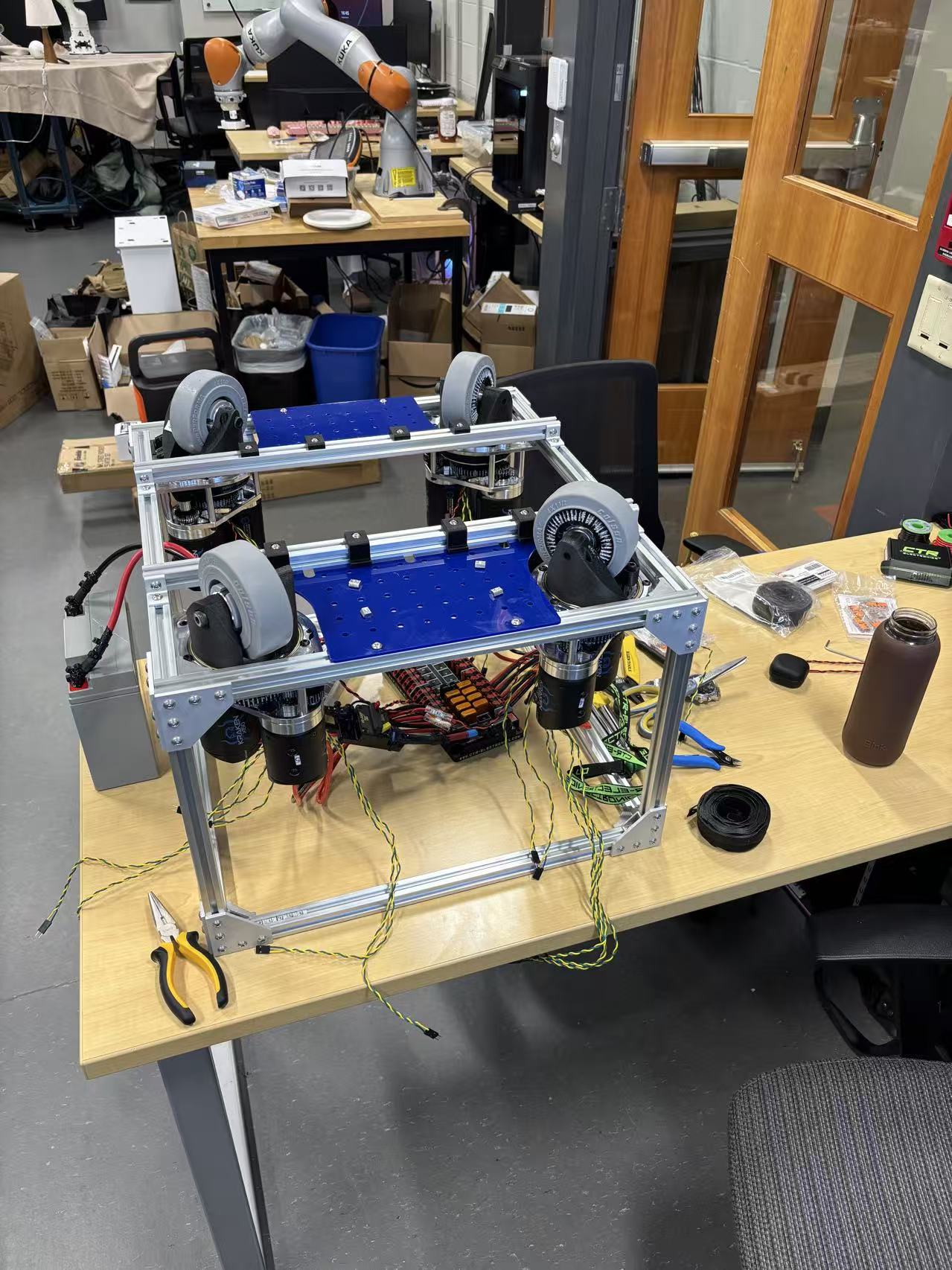
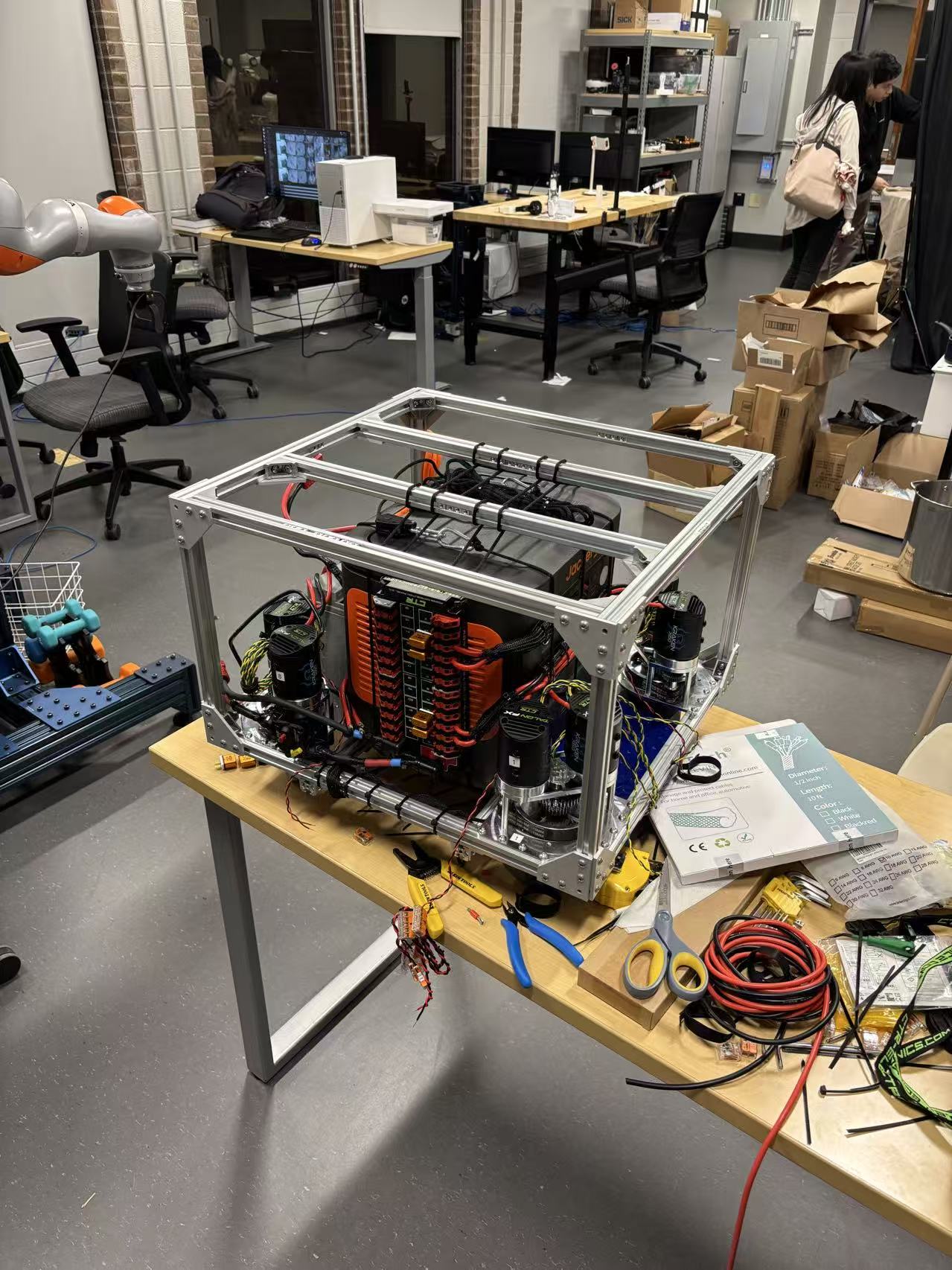
Tidybot is a modular mobile manipulation platform designed for autonomous indoor object handling and tidying tasks. It combines a holonomic mobile base, onboard computing, dual power systems, modular sensing, and support for manipulators such as the Franka Panda and KUKA iiwa7. The platform integrates OpenClaw to enable AI-agent-driven grasping and manipulation, where generated task code calls predefined base, arm, and safety controllers.
Users can interact with the robot through a web-based UI, define safe operating boundaries, save short-horizon task presets, and compose them into long-horizon tasks using a skill-tree workflow. The system also includes collision recovery through joint-torque detection, allowing the robot to automatically retreat to a safe position when contact occurs.